Швейцарські інженери створили квадрокоптер, який здатний змінювати свою форму під час польоту. Він може складати плечі для прольоту крізь вузькі отвори або захоплення предметів, причому алгоритм управління здатний стабілізувати дрон навіть при асиметричному розташуванні роторів.
Присвячена розробці стаття опублікована в IEEE Robotics and Automation Letters, а також доступна на сайті Цюріхського університету.
Більшість дронів мають досить великий розмір, що дозволяє їм нести на собі ємний акумулятор і піднімати додаткове навантаження, наприклад, камеру. Крім того, широко рознесені по сторонам ротори дозволяють збільшити стабільність польоту в порівнянні з аналогічними коптером з меншою довжиною плечей. Але великий розмір дрона - це також і недолік. По-перше, такі коптери незручно перевозити або носити з собою. Ця проблема частково вирішена розробниками складних квадрокоптерів, деякі вже випускаються серійно. По-друге, великі дрони нездатні пролітати у вузьких отворах, що може бути критичним, наприклад, під час рятувальних операцій в будівлях. На сьогоднішній день вже існує кілька проектів зі створення коптера з елементами, що можуть складатися в польоті, але поки вони мають вкрай складну конструкцію або можуть змінювати свою форму лише на короткий проміжок часу через нестабільність польоту в зміненій конфігурації.
Інженери під керівництвом Давида Скарамузза з Цюріхського університету і Швейцарської вищої технічної школи Цюріха створили дрон з класичною конструкцією, здатний змінювати свою форму в польоті і стабілізувати своє становище при будь-якому взаємному розташуванні плечей з роторами в одній площині. У центральній частині квадрокоптера розташовуються керуючі плати, акумулятор, а також чотири сервомотори, розташовані в кутах корпусу. Ці сервомотори надають руху плечам дрона, повертаючи їх відносно корпусу в горизонтальній площині в діапазоні 170 градусів. На кінцях плечей встановлені електромотори з трилопатевими гвинтами. Оскільки плечі дрона можуть розташовуватися близько один до одного, сусідні гвинти закріплені на різній висоті і не можуть зіткнутися при зближенні.
Всі обчислення, необхідні для польоту, дрон виконує за допомогою власних потужностей. Він орієнтується в просторі за допомогою візуально-інерційного одометра, яка аналізує переміщення і положення апарата по кадрам з двох камер, а також показаннями гіроскопа і акселерометра.
Головна відмінність нового дрона полягає в алгоритмі управління. Він відстежує становище плечей і всього квадрокоптера, і на підставі цих даних постійно розраховує центр мас і тензор інерції. Після розрахунку нових параметрів він розраховує такі параметри тяги для кожного електромотора, щоб дрон залишався в стабільному положенні або летів по команді оператора, не зміщуючись або перекидаючись.
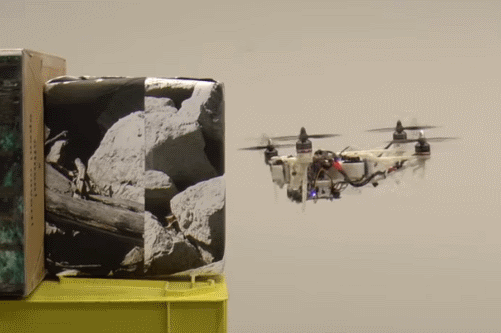
Розробники показали безліч випробувань і прикладів роботи дрона. У звичайному стані його плечі розташовані в X-подібній конфігурації. Якщо апарату необхідно пролетіти через вузький вертикальний отвір, він може витягнути всі плечі паралельно один одному в H-подібну конфігурацію, а при прольоті горизонтальних прорізів оптимальна конфігурація - O-образна. Також розробники передбачили режим з T-образною конфігурацією, який дозволяє дрону підлетіти максимально близько до досліджуваного об'єкта і знімати його на вбудовані камери. Крім того, дрон може піднімати невеликий вантаж, затискаючи його між плечима. Інженери відзначають, що крім очевидних переваг у такого підходу є і недолік - енергоефективність польоту знижується через перекриття гвинтів в крайніх положеннях, а також через нерівномірний розподіл тяги гвинтів.





 Швейцарські інженери створили квадрокоптер, який здатний змінювати свою форму під час польоту. Він може складати плечі для прольоту крізь вузькі отвори або захоплення предметів, причому алгоритм управління здатний стабілізувати дрон навіть при асиметричному розташуванні роторів.
Швейцарські інженери створили квадрокоптер, який здатний змінювати свою форму під час польоту. Він може складати плечі для прольоту крізь вузькі отвори або захоплення предметів, причому алгоритм управління здатний стабілізувати дрон навіть при асиметричному розташуванні роторів. 







