Команда розробників із Китаю спільно з робототехнічною компанією Galbot створила систему LATENT, яка дозволила людиноподібному роботу Unitree G1 освоїти гру в теніс і успішно повертати м’ячі у визначені зони корту в 96,5% випадків із 10 000 випробувань.
Система LATENT базується на навчанні робота з використанням недосконалих даних про рухи гравців-аматорів. Розробники зібрали близько п'яти годин записів базових тенісних рухів — ударів праворуч і ліворуч, бічних і перехресних кроків — за допомогою компактного обладнання для фіксації руху. Ці дані потім були розкладені на елементарні рухові компоненти та завантажені в латентний простір дій, де робот навчився інтерпретувати та комбінувати рухи через навчання з підкріпленням у масштабному симуляційному середовищі.
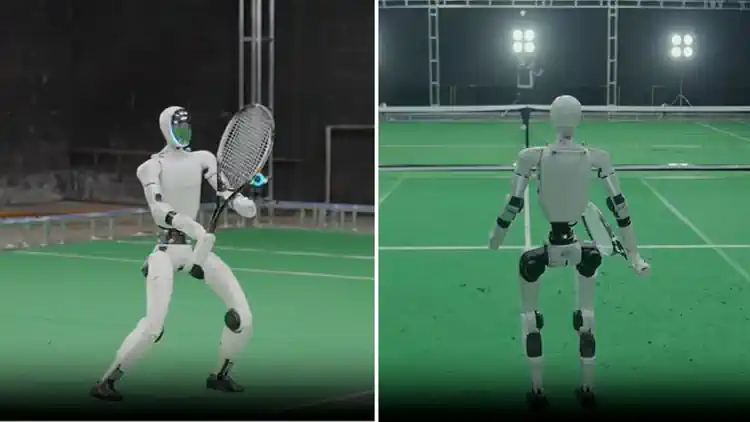
Робот Unitree G1 пройшов тестування в реальних умовах, беручи участь у багатоходових розіграшах проти живих гравців як біля сітки, так і на задній лінії. За результатами випробувань система LATENT перевершила попередні методи роботизованого навчання за точністю ударів, відсотком успішних повернень і природністю рухів.
На поточному етапі робот не здатний змагатися з професійними тенісистами. Система залежить від зовнішнього обладнання для фіксації руху та працює зі спрощеним ігровим сценарієм — поверненням випадково поданих м'ячів у фіксовані точки. Для подальшого розвитку дослідники планують впровадити активний комп'ютерний зір і багатоагентне навчання, при якому роботи будуть тренуватися один проти одного в умовах, наближених до змагального матчу. Автори також вказують, що метод LATENT можна застосовувати за межами тенісу — у футболі та паркурі, де якісні дані про рухи людини важкодоступні.